关联容器
关联容器实现能快速查找( O(log n) 复杂度)的数据结构。
关联容器有以下几种
- set:有序集合,键唯一
- map:键值对集合,键唯一
- multiset:键集合,键不唯一
- multimap:键值对集合,键不唯一
关联容器的实现
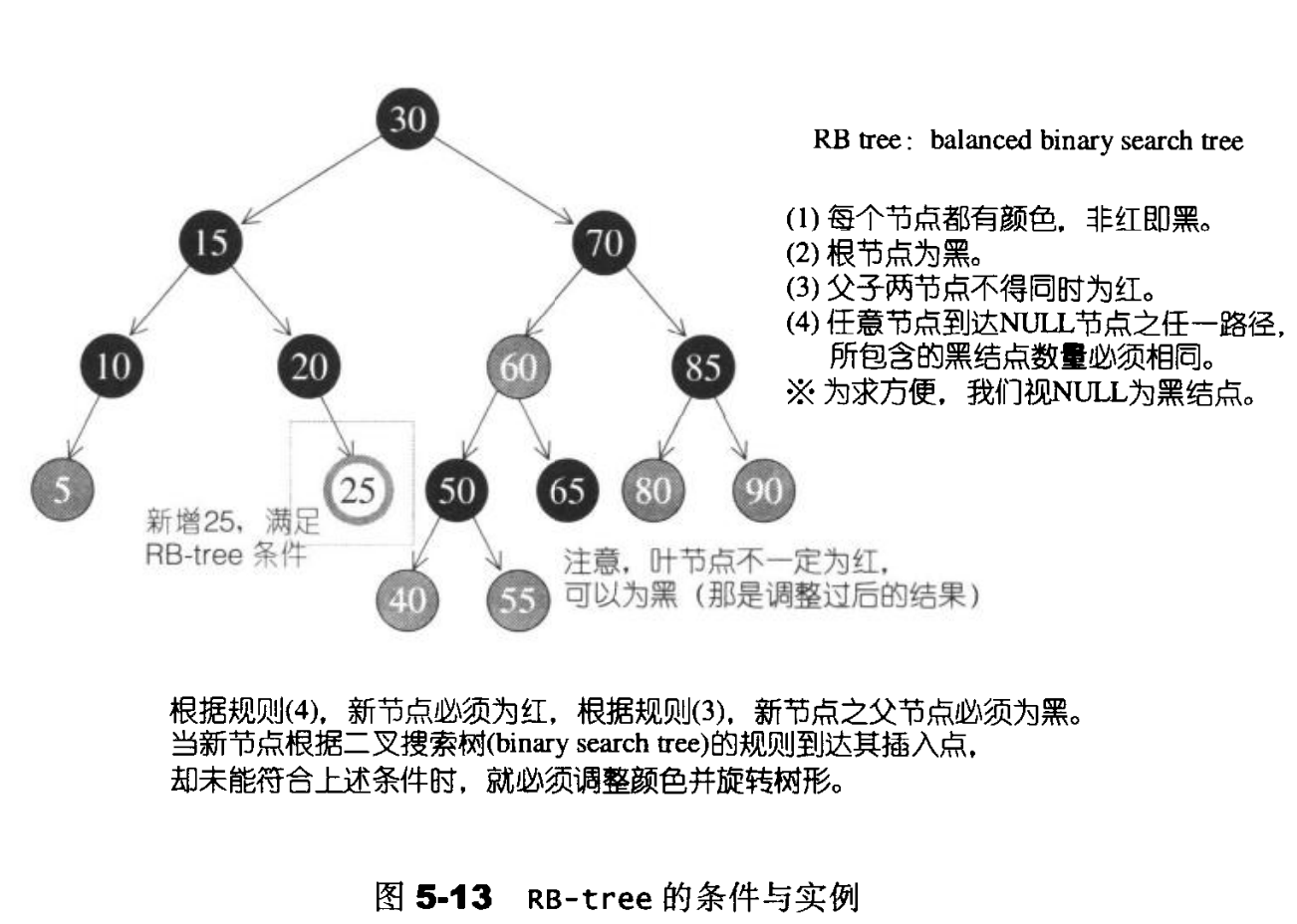
关联容器的内部由红黑树实现,红黑树是一颗平衡的二叉搜索树(BST,Binary Search Tree)
在二叉搜索树中,任何节点的值一定大于左子树每一个节点的键值,小于右子树中每一个节点的键值
但是在极端的情况下,二叉搜索树可能失去平衡,退化为一个链表,造成查找效率低下。因此出现了平衡二叉搜索树,如AVL-tree,红黑树等
STL的红黑树实现中,会提供两个函数insert_unique和insert_equal分别来实现set/map和multiset/multimap
由于实现的特性,关联式容器是根据键值有序的,默认从小到大排序(使用std::less
rbtree
为什么选择红黑树
AVL树要求每个节点的左右子树高度差不超过1,因此其最坏的查找时间为O(logn)
但为了严格满足AVL树的高度要求,在每次插入或删除节点时,几乎都会破坏AVL树的平衡,进而我们需要通过旋转来使之平衡
显然这对插入,删除频繁的场景很不友好,性能大大降低
而红黑树的高度要求不像AVL树那样严格,频繁插入删除不会频繁破坏平衡,也就不需要频繁调整,这其实是一种折中的方案
但仅从查找效率来说,AVL树要由于红黑树
总的来说:平衡树是为了解决二叉查找树退化为链表的情况,而红黑树是为了解决平衡树在插入、删除等操作需要频繁调整的情况
迭代器失效
关联容器的迭代器和引用除了元素被删除外不会被非法化(包括end迭代器)
关联式容器的注意事项
- map的operator[]可能会新增元素
- 关联式容器实现了lower_bound,upper_bound和equal_range的成员函数
- 使用通用的lower_bound,upper_bound和equal_range函数会导致查找效率变低(用在非随机存取迭代器上都会导致效率变低)
- 删除元素时注意迭代器失效的问题;代码
map.erase(it); it++;是错误的 - 无法通过迭代器修改键值,但可以修改map/multimap的value值

